COBOT

El término COBOT se utilizó por primera vez en el año 1999. Es un neologismo que surge de la unión de las palabras “Colaboración” y “Robot”. Cuando hablamos de estos robots es imprescindible utilizar el término cooperación, pues es su principal particularidad, y para lo que fueron creados; interactuar con los operarios en las fábricas de manera que la producción consiga unir las ventajas que aportan cada uno de ellos. Actualmente se presentan como la mejor opción para la automatización industrial, convirtiéndose en la pieza clave para el desarrollo de la Industria 4.0.
Según un estudio realizado por investigadores del Instituto Tecnológico de Massachusetts, la colaboración entre humanos y robots es un 85% más productiva que la de una persona o un robot trabajando por separado. Además los COBOTS ponen a las personas a la cabeza del proceso creativo, ya que su versatilidad permite la automatización de las tareas repetitivas, tediosas, agotadoras, difíciles, peligrosas o incómodas que no se pueden automatizar con robots tradicionales. El robot colaborativo hace el papel de asistente del trabajador.
Su sencilla programación, que no requiere de conocimientos avanzados, las funciones más simples pueden requerir tan sólo unas pocas horas de programación. Por oposición, cuando los robots industriales tradicionales (no colaborativos) han de hacer nuevas tareas con diferentes desplazamientos, requieren de un proceso complejo de reprogramación.
Cada vez se emplean más los COBOTS para realizar tareas en sectores como la construcción, la industria automotriz, la conducción o incluso en sanidad (destinados a la asistencia de personas mayores, la manipulación de sustancias tóxicas u operaciones en las que se requiera una alta precisión). Además, también están empezando a utilizarse en sectores a priori menos esperados, como los del espectáculo o de las artes.
La creciente popularidad de los Robots Colaborativos para la automatización de procesos no procede exclusivamente de sus capacidades, sino que también se debe a que es un producto competitivo, al que podrán acceder incluso las pequeñas y medianas empresas. El promedio de su ROI es inferior a un año, permitiendo a muchas empresas de diferentes sectores obtener rentabilidad desde el primer momento.
A diferencia de los robots industriales tradicionales, no necesitan vallado de seguridad, ya que están preparados para trabajar junto a los operarios en los entornos de producción. Los COBOTS están programados para detenerse en el momento en el que entran en mínimo contacto, y esto basta para que el COBOT se detenga y deje de realizar la función para la que ha sido programado.
Características del entrenador:

Capacidad de carga de 3kg,
500 mm de alcance.
Robot industrial colaborativo ultraligero y compacto, ideal para la aplicación sobre mesas de trabajo. Su tamaño reducido lo convierte en el más adecuado para implementarse directamente dentro de maquinaria o en otros espacios de trabajo pequeños.
Este COBOT pesa tan solo 11 kg, pero tiene una carga útil de 3 kg.
Su rotación ±360 grados en todas las articulaciones y su rotación infinita en el extremo hace que sea ideal para ensamblajes ligeros.
Griper de desplazamiento paralelo con dedos de acero con acabado anodizado, con capacidad de tomar 3 diferentes piezas
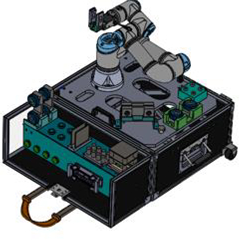
Maleta para Robot que permite su fácil movimiento y transporte.
Mesa de trabajo abatible tipo tijera, la cual sirve como base para el Robot
Maleta para controlador de Robot para su seguridad y transporte.

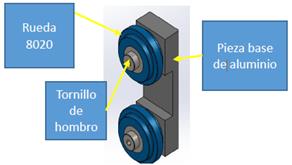
Proceso de ensamble
Para el desarrollo de este proceso se propone ensamblar la pieza que se muestra en la imagen, la cual consiste de 3 piezas diferentes.
Rueda 8020
Pieza base de aluminio
Tornillo de hombro
Proceso de paletizado. El entrenador cuenta con un área con un proceso de paletizado, la cual incluye un pallet, placas de plástico y cilindros que te permiten simular un proceso de paletizado lo más real posible respecto a lo que se encuentra en la industria ya que cuenta también con su sistema de seguridad y panel de operación.

INCLUYE
Capacitación de 40 horas para 4 personas
Itinerario básico:
- Introducción al robot
- Hardware
- Controlador
- Paradas de protección
- Seguridad
- Consola de programación
- Preparación de una tarea
- Conector de herramientas
- Conectar sensores
- Renombrar entradas
- Placa de control de seguridad
- Como ajustar una herramienta
- Configuración de un efector final
- Centro de gravedad
- Carga útil
- Punto central de la herramienta
- Orientación
- Crear un programa
- Tipos de movimiento
- Puntos de paso
- Interacción con dispositivos externos
- Acomodar pinza
- Comando esperar
- Cambiar carga útil
- Comando ajustar
- Control de un proceso
- Subtareas
- Ajuste de seguridad
- Escáner de seguridad
- Parada de protección
- Límites de seguridad
- Parada de emergencia externa
- Modo reducido
- Reinicio de protección
- Optimización del proceso
- Aceleración
- Velocidad
- Itinerario avanzado:
- Flujo de programación
- Variables
- Else if
- Entrada del operario
- Subprogramas
- Editor de expresiones
- Sistemas de coordenadas
- Funciones de coordenadas
- Mover función
- Mover robot en relación a una función
- Crear función
- Alinear robot con una función
- Control de fuerza
- Control de fuerza
- Funciones de paletizado
- Plantillas
- Capas
- Patrones
- Separadores
Estamos en condiciones de poder adaptarnos de acuerdo a las especificaciones que el usuario desee tener, de igual forma podemos diseñar para que la totalidad de un proyecto sea adquirida en etapas o bien en función al presupuesto disponible.